以折叠臂式为例介绍举升机构的设计
1.折叠型式和运动范围的选取
常用的上折叠式动臂举升机构如图5-52所示,它由三个动臂组成,即下臂3、上臂4和折叠臂7.下臂的下端铰接在回转台上,由下臂液压缸驱动;上臂的下端与下臂的上端铰接,由撑臂液压缸5和四杆机构驱动;折叠的一端与上臂的上端铰接,由折臂的液压缸6驱动;作业斗与折臂的另一端铰接,有内藏式链式四杆机构保证作业斗保持水平。
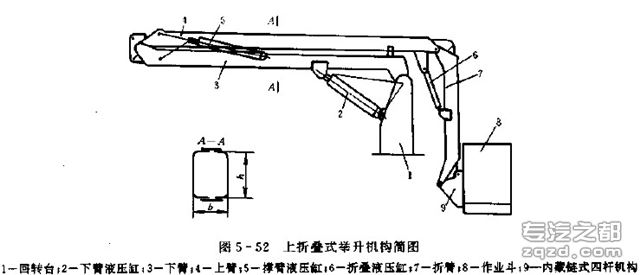
该举升机构在铅垂平面内的运动范围为:
下臂相对于回转台:0°~82°
上臂相对于下臂:0°~160°
折臂相对于上臂:0°~90°
2.驱动液压缸设计
(1)下臂液压缸 应以下臂液压缸所受最大载荷的设计工况,同时还要校核下臂处于最大仰角时的工况,此时也液压油缸轴线至下臂铰接点距离最近,液压缸可能出现反拉现象,且在做回缩动作时,有杆腔工作,液压缸受拉力作用。
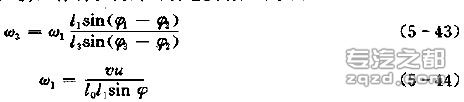
(2)撑臂液压缸 撑臂液压缸一般与四杆机构配合,组成撑臂机构,如图5-53所示,其目的是减少液压缸的体积。但这种机构使上臂动作的速度不均匀,设计时要特别注意。设 为上臂绕铰接点的回转角速度,由图中可知,撑臂机构的运动速度有如下关系:
为上臂绕铰接点的回转角速度,由图中可知,撑臂机构的运动速度有如下关系:
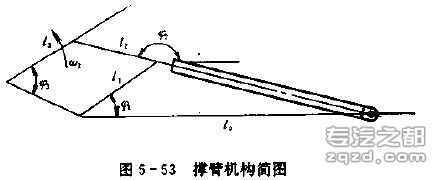
式中 v——液压缸的工作速度(m/s);

有上述公式可见,合理的布局可使上臂速度变化小,有利于作业斗的稳定性。
对液压缸的参数确定和设计,按有关液压传动和液压系统设计的要求进行。
3.动臂的主要尺寸确定和结构设计
动臂为主要受力构件,受弯扭联合作用。为获得较大的强度个刚度,一般采用薄壁箱形结构。为减少焊接变形,臂架一般由两块冲压成形的槽型板对接而成,如图5-52所示,槽型板折边采用大圆角型式,这可增强板件的抗局部失稳能力。为使主受弯截面获得较高的抗弯截面模量,可加布上、下加强筋板,获得渐进的等强度受力状态。
(1)主要尺寸确定 动臂的截面高度h可按使结构质量最小的高度提出的设计公式计算,有:
 (5-45)
(5-45)
式中  ——按动臂最大合成弯矩求得的抗弯截面模量;
——按动臂最大合成弯矩求得的抗弯截面模量;
 ——腹板的厚高比。
——腹板的厚高比。
动臂的高宽比h/b不宜太大,因为动臂除受弯外还受扭,为获得合理的抗扭截面,一般推荐h/b=1.25~1.5.
(2)动臂的强度校核 按动臂的工况,采用相应的载荷组合进行强度校核。
正应力 为:
为:
 (5-46)
(5-46)
式中  ——主受弯截面的最大弯矩;
——主受弯截面的最大弯矩;
 ——由水平力引起的最大弯矩;
——由水平力引起的最大弯矩;
 ——主梁截面对中性轴x和y的截面模量;
——主梁截面对中性轴x和y的截面模量;
 ——材料的许用应力。
——材料的许用应力。
剪应力r为:
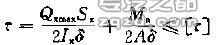 (5-47)
(5-47)
式中  ——主受弯截面的垂直剪力;
——主受弯截面的垂直剪力;
 ——截面的扭矩;
——截面的扭矩;
 ——截面对中性轴的惯性矩;
——截面对中性轴的惯性矩;
 ——截面的最大静距;
——截面的最大静距;
A=bh——由板的中线所围成的截面面积(见图5-52);
 ——腹板的厚度
——腹板的厚度
[r]——材料的许用剪应力。
验算动臂的合成应力,有:
 (5-48)
(5-48)
除上述强度校核外,还应进行动臂的稳定性,板的局部稳定性校核。
欢迎转载专汽之都网 - 专用车报价,配件,资讯,服务,视频,图片全知道文章,转载请注明出处!本文网址:http://www.zqzd.com/Article/Detail/61679
 ¥20~¥100
416341液压滤芯 品质值得信赖
¥20~¥100
416341液压滤芯 品质值得信赖
 ¥22~¥87
34C3429空气滤芯 净化高效
¥22~¥87
34C3429空气滤芯 净化高效
 ¥40~¥120
53C0197液压滤芯 做工精良
¥40~¥120
53C0197液压滤芯 做工精良
 ¥50~¥120
供应32-925140空气滤芯 货源充足
¥50~¥120
供应32-925140空气滤芯 货源充足
 ¥50~¥120
供应40-300893液压滤芯 量大优惠
¥50~¥120
供应40-300893液压滤芯 量大优惠
 ¥50~¥120
供应32-925670液压滤芯 进口滤材
¥50~¥120
供应32-925670液压滤芯 进口滤材
 ¥50~¥120
供应335-D8924液压滤芯 诚信为本
¥50~¥120
供应335-D8924液压滤芯 诚信为本
 ¥50~¥120
供应335-G2061燃油滤芯 美观耐用
¥50~¥120
供应335-G2061燃油滤芯 美观耐用
 ¥45~¥49
20吨 解放 国六牛奶运输车厂家
¥45~¥49
20吨 解放 国六牛奶运输车厂家
 ¥1~¥9999
瑞典 SKF 轴对中仪 TKSA 31
¥1~¥9999
瑞典 SKF 轴对中仪 TKSA 31



